So far, there is no unified definition of intelligent robots in the world. Most experts believe that intelligent robots must have at least three elements: one is the sensory element, which is used to recognize the state of the surrounding environment; the other is the moving element, which reacts to the outside world; the third is the thinking element, which is obtained according to the sensory element. Information, think about what kind of action to use. The reason why intelligent robots are called intelligent robots is because they have a fairly developed "brain." What works in the brain is the central processor, which has a direct connection to the person who operates it. The main thing is that such a computer can perform actions arranged according to purpose. Because of this, we say that such robots are real robots, although their appearance may be different. This article describes how to implement intelligent automatic following robots with quinect based on Qualcomm's Dragonboard410c.
one. Hardware environment: Dragboard410c+Kobuki base+kinect sensor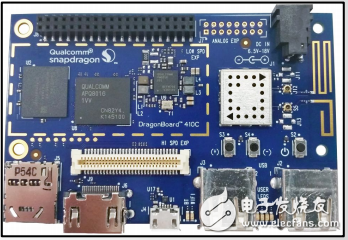
Figure 1 Dragonboard410c

Figure 2 Kobuki base

Figure 3 kinect sensor
two. Software environment: Linaro+ROSHere we introduce how to quickly build the design environment, you can first install the Debian system in the Dragonboard410c, and then download the following three key installation files to the root directory through the network.
download link:
Http://builds.96boards.org/releases/dragonboard410c/linaro/rescue/latest/dragonboard410c_bootloader_emmc_linux-*.zip
Http://builds.96boards.org/releases/dragonboard410c/linaro/debian/latest/boot-linaro-jessie-qcom-snapdragon-arm64-*.img.gz
Http://builds.96boards.org/releases/dragonboard410c/linaro/debian/latest/linaro-jessie-developer-qcom-snapdragon-arm64-*.img.gz
Unzip these three files in the root directory, and install these images into the system through fastboot. After the installation is complete, restart, connect the keyboard to Dragonboard410c, log in to the system through linaro's terminal console, the default user and password are :linaro.
Then run the install_ros_410c.sh script we uploaded (appendix at the end of this article).
three. Overall physical map
Figure 4 turtlebot overall physical map
four. The exhibition process at the Beijing Chuangke event
Figure 5 follows separately

Figure 6 Queue follows
Marine Power Distribution Cabinet
We are a specialist automation systems integrator with our own well-equipped workshop for building electrical and industrial control panels. Our team use the very latest design and project software, to ensure traceability throughout all steps of the manufacturing process. We constantly invest in the latest electrical control system building equipment, tools, and software.
Every control system is designed to suit your specific application; using only the very best components from leading manufacturers. We are happy to build control panels from your own electrical schematics, or alternatively
The whole Power Distrubtion Cabinet is designed , assembled, testing, programming and site commissioning by our team. Every year we do some projects for power distrubtion cabinets and accumulate rich experience in marine power system.
Being a quality driven firm, we do hard work to serve our customers in a well-systematized & successful way by presenting the optimum grade services. Our offered services are rendered by a crew of creative and talented personnel. We provide these services in accordance with the prevailing industry guidelines and set principles by using contemporary technology. In addition to this, offered services are highly in demand in the market for their outstanding features such as cost effectiveness, hassle free management and timely execution.
Power Distribution Cabinet,Marine Distribution Cabinet,Marine Power Distribution Cabinet,Shipyard Power Distribution Cabinet
Nantong Double Star Automation Equipment Co., Ltd. , https://www.nt-doublestar.com